Chapter 13
Continuous
Systems; Waves
Continuous String
In Chapter 12 we examined finite systems of particles distributed along a loaded string. A continuous string can be consider to be a limiting case of the loaded string, where we increase the number of masses n to infinity while decreasing the separation d between the masses to 0 such that (n+1)d = L = constant, and decrease the value of each mass m to 0 such that m/d = r = constant.
Reviewing the discussion of Chapter 12 we recognize that in the limit of large n we can make the following approximations:
![]()
![]()
The displacement of the string will
now become a function of x where x is the position of element j:
![]()
where
![]()
We need to keep in mind that only the real parts of our functions matter. Assuming we know the tension in the string, the length of the string, and the mass density of the string, we can see immediately that the displacement is defined by the value of the complex amplitude. These values are defined by specifying the displacement and the velocity of the string at time t = 0:
![]()
and
![]()
The coefficients of the amplitudes can now be found. They key step to finding the amplitudes
is to multiply each side by sin(rpx/L)
where r is an integer, and
integrating over x with x varying between 0 and L. If we
just focus on the sin terms we use the following relation:
![]()
Note: in the last step we have used the argument that if r ≠ s
![]()
and if r = s
![]()
![]()
Example: Problem 13.2
Rework
the problem in Example 13.1 in the event that the plucked point is a distance L/3 from one end. Comment on the nature of the allowed modes.
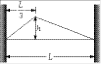
The initial conditions are
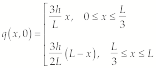 (1)
(1)
![]() (2)
(2)
Because
![]() , all of the
, all of the
![]() vanish. The
vanish. The
![]() are given by
are given by
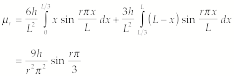 (3)
(3)
We see that
![]() for r = 3, 6, 9, etc. The displacement function
is
for r = 3, 6, 9, etc. The displacement function
is
![]() (4)
(4)
where
![]() (5)
(5)
The frequencies
![]() ,
,
![]() ,
,
![]() , etc. are absent because the initial displacement at
, etc. are absent because the initial displacement at
![]() prevents that
point from being a node. Thus, none of the harmonics with a node at
prevents that
point from being a node. Thus, none of the harmonics with a node at
![]() are excited.
are excited.
Energy
of the String
Since
we know the displacement of the string, as function of x and t,
![]()
we can calculate the kinetic energy
and the potential energy of the system.
Consider
a small segment of the string, located at x and with a width dx. The mass of this segment is rdx. The kinetic energy of
this segment is equal to
![]()
The total kinetic energy of the
string is obtained by integrating x over
the entire string:
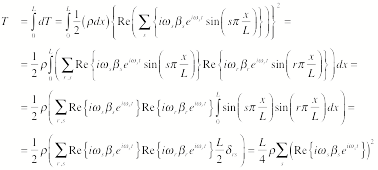
The amplitude b is a complex number with a real
amplitude and an imaginary amplitude:
![]()
The kinetic energy of the string is
thus equal to
![]()
In order to determine the potential
energy of the system, we revisit the potential energy we determined for the
loaded string in Chapter 12:
![]()
In order to approximate the a string
we take the limit of n going to
infinity:

In this limit, the potential energy
approaches
![]()
Since the partial differential of q with respect to x is equal to
![]()
we find that the potential energy is
equal to
The total energy of the string is

The total energy is independent of
time and thus is constant. The
time-average of the kinetic energy is equal to the time-average of the
potential energy:
![]()
The
Wave Equation
In
the previous sections we have looked at the possible displacement patterns of a
string, based on the solution of the loaded string discussed in Chapter
12. The solution discussed so far
is appropriate for situations in which the restoring force is conservative, and
no damping or driving forces are present. In order to determine the effect of external forces on the system, we
need to go back and determine the force acting on each segment of the string.
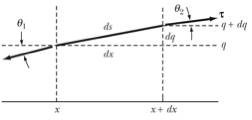
Figure 1. Small
segment of a string.
Consider
the segment of the string shown in Figure 1. We assume that the tension in the string is constant, and
that the tension is responsible for the restoring force that tries to bring the
string back to its equilibrium position. Consider a segment of the string of length ds. We
will assume that the parts of the string only carry out a displacement in the
vertical direction. In order to
determine the restoring force, we thus need to focus on the vertical component
of the tension at the end points of the section we are focusing on. Using the geometrical information
contained in Figure 1 we find that the net force is equal to
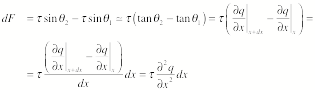
This force will result in a motion
of the segment of the string. The
segment under consideration has a mass dm = r ds. The
acceleration of this section is of course related to the force acting on this
section:
![]()
Combining these
last two equations we obtained what is known as the wave equation:
![]()
This form of the wave equation is
the "ideal" wave equation. In order to include effects such as damping forces and driving forces,
we need to include these forces in our calculation of the net force:
![]()
We can try to solve this
differential equation by using the following trial solution:
![]()
Using this trial solution we can
determine the various components of the equation of motion:
![]()
![]()
![]()
The equation of motion can now be
rewritten as
![]()
or
![]()
We can remove the dependence on x of the left-hand side of this equation by
multiplying each side by sin(spx/L) and integrating over x:
![]()
or
![]()
Our complicated second-order
differential equation in x and t has been replaced by a simpler second-order
differential equation in t.
Example:
Problem 3.11
When
a particular driving force is applied to a string, it is observed that the
string vibration is purely in the nth harmonic. Find the driving force.
From Eq. (13.44)
![]() (1)
(1)
where
![]() is the driving
force, and
is the driving
force, and
![]() is the Fourier
coefficient of the Fourier expansion of
is the Fourier
coefficient of the Fourier expansion of
![]() . Eq. (13.45) shows that
. Eq. (13.45) shows that
![]() is the component
of
is the component
of
![]() effective in
driving normal coordinate s. Thus, we
desire
effective in
driving normal coordinate s. Thus, we
desire
![]() such that
such that
![]()
From the form of (1), we are led to try a solution of the form
![]()
where g(t) is a function of t only.
Thus
![]()
For n ¹ s, the
integral is proportional to
![]() ; hence
; hence
![]() for s ¹ n.
for s ¹ n.
For n = s, we have
![]()
Only the
![]() normal
coordinate will be driven.
normal
coordinate will be driven.
![]()
Solving
the Wave Equation
We
now return to the ideal wave equation:
![]()
Since the ratio r/t has the units of 1/(m/s)2, the wave equation is frequently rewritten
as
![]()
The wave equation is a second-order
differential equation for a function that depends on two variables. One approach that is frequently useful
to try is separation of variables:
![]()
Substituting this expression for q into the wave equation we get
![]()
By rearranging this equation we can
bring all terms that depend on x to the
left-hand side and all terms that depends on t to the right-hand side:
![]()
This equation can only be correct if
the term on the left-hand side is independent of x and the term on the right-hand side is independent
of t. Each term must thus be equal to the same constant, which we
call w2:
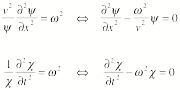
These second order differential
equations can be solved easily, and we find that

The general solution of the wave
equation is thus
![]()
The parameter w/v is also called the wave number k. In order to look at some
of the properties of this solution, let us focus on just the first term. Consider that we look at the
displacements of the solution at (x, t). A small time later, at time t + dt,
this feature of the solution will have moved a distance dx such that:
![]()
We thus conclude that
![]()
or
![]()
The displacement we are focusing on
thus appears to move with a velocity -v,
and the quantity v is therefore
called the wave velocity. We note
that for this solution, the solution is traveling towards the left.
The
solution is periodic and we can thus associate a wavelength with it. We require that the amplitude at x is the same as the amplitude at x + l. This requires that
![]()
or
![]()
The exponent of the exponential
(minus the i) is called the phase of the
wave. When a particular
displacement moves along the string, the associated phase will remain constant:
![]()
The phase velocity V is velocity of the displacement that keeps the phase
constant:
![]()
Thus
![]()
We see that in general the
velocities are wave-number dependent, unless w is proportional to k, and the medium is called a dispersive medium.
Although
each of the components in the general solution of the wave equation corresponds
to a wave traveling either towards the left or towards the right, not all
linear combinations of the solutions correspond to traveling waves. For example consider the following
linear combination of two solutions with the same amplitude:
![]()
The only component of the amplitude q that is relevant for the real world is the real
part:
![]()
When we look at this real part, we
see that at certain values of x the
amplitude is always 0. This
solution can thus not represent a traveling wave. This particular solution is called a standing wave.
Up
to know we have not made any constraints on the angular frequency w. The angular frequency is a function of the wave number. For the loaded string we found that
![]()
Based on the solutions for the
loaded string we expect that the length L and
the index r are related to the
wavelength in the following manner:
![]()
Using this relation we can rewrite
our expression for the angular frequency as follows
![]()
The phase velocity is thus equal to
For the loaded string, the index r runs from 1 to n. The
maximum value of r gives a
minimum value of the wavelength:
![]()
This wavelength corresponds to the
following wave number:
![]()
The corresponding frequency is thus
equal to
![]()
This frequency is the maximum
frequency the string can support when the wave number is a real number. The system can support larger
frequencies, but at that point the wave number becomes complex. We will now consider what the impact of
a complex wave number is:
![]()
The corresponding angular frequency
is

Since we are focusing on solutions
of the ideal wave equation, energy must be conserved (there are no dissipative
forces included) and the angular frequency must be a real number. This implies that the imaginary part of
the previous equation must be zero, or
![]()
One possibility is that b = 0, but this implies that the wave
number is real, which contradicts with our initial assumption. Thus we must require that dk/2 = p/2
or k = p/d. In this case, we can write the angular
frequency as
![]()
The dependence of the components of k on w is shown in Figure 2.
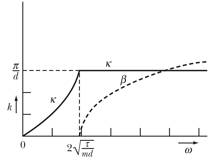
Figure 2. Dependence of the wave number (and its components) on the angular
frequency.
The solution of the wave equation
now contains terms such as
![]()
This solution has a
position-dependent amplitude, indicating that the energy of the system is
localized. However, the amplitude
is not time dependent, and energy is thus conserved.

In previous Chapters we have focused on the description of rigid bodies, which are systems of particles whose relative positions are fixed, independent of the overall motion of the system. Most bodies however are not rigid, and their particles can move with respect to one another. The motion of these individual particles gives the bodies the ability to transmit disturbances from one position to another position. These disturbances are called waves. Waves that are transmitted fall into two categories:
1. Transverse waves: particles are displaced in a direction perpendicular to the direction of propagation of the wave.
2. Longitudinal waves: particles are displaced in a direction parallel or anti-parallel to the direction of propagation of the wave.